




YoDoug®
-
Posts
1,309 -
Joined
-
Last visited
-
Days Won
45
Content Type
Profiles
Forums
Downloads
Store
eMastercam Wiki
Blogs
Gallery
Events
Posts posted by YoDoug®
-
-
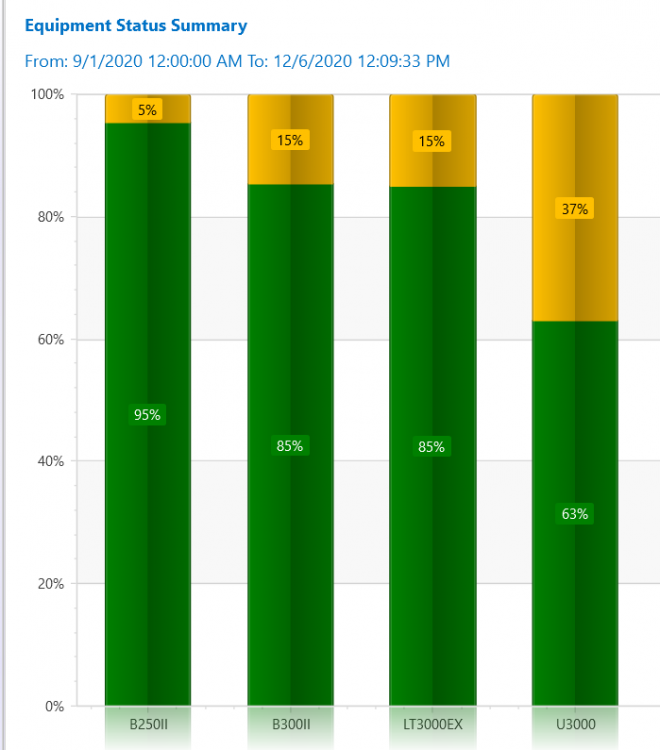
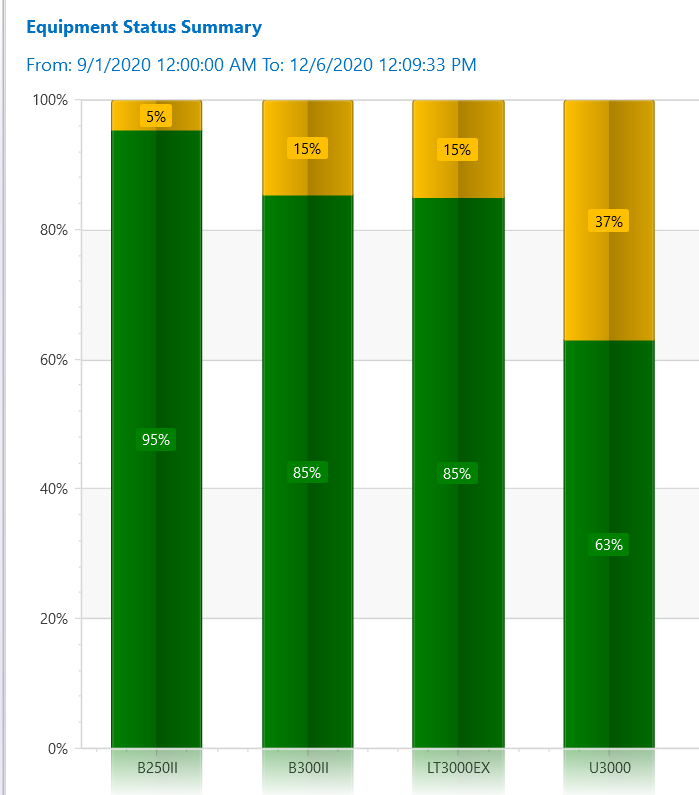
Here is a more recent summary including the Multus U3000 we added in August. The Multus B250, or the baby Multus, as we call it, only runs about 6-7 part numbers of our higher volume parts. That thing only stops running to change chuck jaws and robot jaws once a day or so. The Multus U3000 only has a dozen proven programs so far and we are still working out chips issues with the lower turret that keep us from running more than 8 hours unattended. We have had a few successful runs of 12-16 hours unattended but we have also had a few that ended up with a couple of broken tools and a tray of scrap parts.
-
 1
1
-
-
4 minutes ago, cncappsjames said:
Okuma is always the little brother with a chip on his shoulder. Always talking while the older brother just does.
So in 5 years when Haas owns more of the market than Fanuc will you say they have the best control?
Biggest market share doesn't automatically make something the best.
-
45 minutes ago, cncappsjames said:
In my 28 years in manufacturing, I have seen a FANUC controlled machine go into an Okuma house exactly twice and into a Mazak house exactly twice. To say it is exceedingly rare is probably understating it. Not saying it doesn't happen... because it does, it just doesn't happen very often.
Getting a Fanuc machine in an Okuma house is like trading your smart phone for flip phone. Why would you want to.

-
32 minutes ago, cncappsjames said:
I can think of a couple guys off the top of my head at Methods in Boston that would know. They may know your ties to Okuma and may not want to give up that info without a PO... that's pure conjecture though. We've withheld information in sales situations because we're not somebody's free engineering service and because sometimes it's people fishing for info.
As for Matsuura... there's at least one guy I can think of that would know perhaps as many as 3 if I count a Japanese Engineer.
I'm a little reticent to share that kind of thing. It can be a little like sharing the Anarchist's Cookbook.

LOL, Are you Pelosi? You have to buy it before we tell you if it can do it or not.
How is sharing standard functions that a control can do comparable to sharing the Anarchists CookBook.
I'm calling BS. Put up or admit Okuma builds a better control.
-
7 minutes ago, cncappsjames said:
I'm nobody special and I know how to do those things so...
Care to share. We have looked at both Nakamura and Matsuura as an alternative to Okuma but when I ask their engineers for details on I can do the things I do now in our OSP I get no answers. Example; The code below will check to see if the feedrate and spindle speed knobs are at 100% and alarm if they are not.
( FEEDRATE OVERRIDE CHECK ) IF[VORD[0019]NE 1]NALM1 GOTO NALM2 NALM1 VUACM[1]='FEED NOT 100 %' VDOUT[992]=1234 NALM2 ( SPINDLE OVERRIDE CHECK ) IF[VORD[038C]NE 1]NALM3 GOTO NALM4 NALM3 VUACM[1]='SPEED NOT 100 %' VDOUT[992]=1234 -
6 minutes ago, byte me said:
Interesting, thanks for the info, I've been looking into collision testing and kinematic awareness in Mastercam.
Could you explain that bit a bit more?
I'm interested.
We check the I/O for chuck clamp signals in our lathe programs to see if sub/main spindle is clamped for each toolpath. If the chuck is not clamped it has a GOTO to skip that toolpath. It allows us have one program that can run main spindle only, sub spindle only, or both simultaneously regardless of which turret is doing the machining. In our twin turret machines It simplifies robot programming because the robot does not have to switch programs for first piece, middle pieces, and last piece. We also have safety checks in our machine to make sure coolant buttons are not turned off/etc. It also comes in real handy with OSP TOOL RESTART function. This function gives you a graphical list of restart points to select form for safe restart. When activated, if a chuck is not clamped on a part it doesn't give you the toolpaths for that spindle as restart points.
I actually don't do the parsing of a text file anymore because I made apps in C# using the API to write the data from the PLC into the controls common variables. They also write data out to the PLC as well, like machine status, door open/closed, unlocked, etc. However the READ/WRITE/GET/PUT Okuma function allows you to parse a text file as a string and read specific characters and write them to common variables for calculation. It is one of the common ways people read in gauging data from a CMM/gauge output file to update tool/work offsets in an automated cell.
-
20 minutes ago, cncappsjames said:
I know I've been using named stuff for at least 20 years best I can recall. Whatever you OSP guys gotta tell yourselves
OSP5000 = 1981 That's almost 40 years.
For me the power, user friendliness, and flexibility of OSP are far greater. Two things I do routinely are check status of machine I/O from NC code, and parse a text file to read in specific data. I have asked many a Fanuc "guru" if those things could be done and gotten no as the answer. The other big one for me is the open API in the OSP control. Every single one of our machines has custom apps that communicate data bi-directionally from the Okuma control to external PLCs and Robots.
-
Fanuc trying to copy OSP again by adding named variables. OKUMA OSP has had named variables for decades.
-
1
-
 1
1
-
-
On 11/27/2020 at 7:52 AM, Aaron Burhoe said:
I would love to see a similar program for a Multus U series. Can you share? Thanks!
Below is code for Multus U with lower turret. Note: in the output file the G13/G14 will be output with () around them. It is a limitation of the READ/WRITE that won't allow it to output a G13/G14, the workaround is to output them with (). Just delete the () when you paste the offset code into your program.
Quote(OUTPUT OFFSETS)
CLOSE C
FWRITC MD1:ZERO-OFFSETS.TXT;
PUT' '
WRITE C
P1
G13
G140PUT 'G13'
WRITE C
PUT 'G140'
WRITE C
PUT 'P1'
WRITE C
PUT 'VSZOZ='
PUT VSZOZ,9
WRITE CPUT 'VSZOC='
PUT VSZOC,9
WRITE CPUT 'VSZOW='
PUT VSZOW,9
WRITE CG141
PUT 'G141'
WRITE C
PUT 'VSZOZ='
PUT VSZOZ,9
WRITE CPUT 'VSZOC='
PUT VSZOC,9
WRITE C
PUT 'P2'
WRITE C
PUT 'M331'
WRITE C
PUT 'G140'
WRITE C
PUT 'DRAW'
WRITE CP2
M331
G14
P2
G140PUT 'G14'
WRITE C
PUT 'G140'
WRITE C
PUT 'P1'
WRITE C
PUT 'VSZOZ='
PUT VSZOZ,9
WRITE CPUT 'VSZOC='
PUT VSZOC,9
WRITE CPUT 'VSZOW='
PUT VSZOW,9
WRITE CG141
PUT 'G141'
WRITE C
PUT 'VSZOZ='
PUT VSZOZ,9
WRITE CPUT 'VSZOC='
PUT VSZOC,9
WRITE C
PUT 'P2'
WRITE C
PUT 'M331'
WRITE C
CLOSE C
M30-
1
-
-
Typically a singularity occurs when the machine is in a position that it interprets an infinite or multiple number of solutions to a command. I have seen it happen before on a table/head machine where the head movement was crossing the exact centerline of the table axis in an arc move. If you have your work offset set at the exact center of an axis it can happen. If it does try moving the work offset of center by a tiny amount (X.0001, Y.0001).
In 6 axis robot it often occurs when you end up with axis 4 and 6 inline with each other or a move that will pass through them being inline. Most robots have programming tools to allow the robot to slightly deviate path to avoid the singularity.
-
2
-
-
6 minutes ago, Matthew Hajicek - Conventus said:
Could you fit four Brothers with automated loading in the same footprint and price?
That is the normal selling objection when selling that type of machine. When I worked for a Hydromat distributor a lot of companies would see the quote and say why wouldn't I just buy x number of robodrills or other small machine. There are advantages to multiple machines. They allow for down time without losing all production, as well as the ability to run different parts when production needs change.
-
3
-
-
What is the material? Even the best thermal comp machines don't account for coolant temp and material temp. I have seen aluminum parts change size and go out of tolerance from adding coolant to the machine.
-
14 minutes ago, crazy^millman said:
We are thinking two different things. They are machining 3 faces of the part using the 3 spindles to achieve that. I am saying you have a part that needs 6 sides machined on it what is the automatic process in the machine to transfer it from one holding to the next holding to machine the part complete in that process inside of the machine without having to send to the load station. The part in the video just needs 3 sides machined, but what about parts that needs 5 or 6 or more sides machined that cannot be gotten to from one holding? What is their process inside of the machine to manage that? A FMS system does it with a pallet pool or any other machines that have more than one holding station as part of the process to machine the parts.
In application like shown hands down very impressive, but in those not standard processes where you need more capability is what I thinking about out loud.
I got ya! I know in the Hydromat systems I have seen they would have a robot loading and unload from outside the machine.
-
5 minutes ago, crazy^millman said:
Doug thank you and I think I get the concept, but that was not what they were showing on the website. They had 3 of the same parts all being made the same way. Normally with a rotary transfer that is what happens, but I didn't see anything on the website showing where and how they support that process which ii why I was making the comments. Did you see something on the website I didn't that talked about how they do the transfer process between each station automatically?
At the 2 min mark they show the parts being indexed between spindles.
-
2 hours ago, crazy^millman said:
Nice looking machine, but no never seen one in production. Looks pretty straight forward to program. Biggest thing is the the fixturing and work holding. I didn't see a robot arm inside to move the parts so curious how that happens. Maybe they make a coolant activated clamping device to go into a tool holder pocket and then use it to transfer from one holding to another. As it looked no way to do one side complete and then flip in the machine and finish the other side out. Seems like they are just 3 Spindles all doing pretty much the same thing or you might be able to integrate a robotic arm into the process. 3 Spindles cutting at one time in the about the same space as a HMC is good, but putting this in a cell or having a FMS part of it would be what I would want to see.
It's a rotary transfer style machine. The four workstations index from spindle to spindle. Load/unload at one station, then each station after machines a little more of the part.
-
Similar concept to a Hydromat Icon machine. We used to rep Hydromat at my last job. They have pretty good support and service. Never heard of Porta until today.
-
If size allows we almost always use insert drills. We use Iscar SumoCham drills for almost everything we can.
A while back, when I worked for the Okuma dist, I had a customer that did a pretty extensive test on drills. He compared Mits, Guhring, Walter, and Iscar SumCham insert drills in 316 stainless. He made a big spreadsheet that accounted for original purchase, resharpening, replacement steel bodies, cycle time, etc. The Insert drills were 20%-40% less cost per hole.
-
3
-
-
I say any tricks you can do to help with chip management are good. We have tool cleaning cycles integrated into our B-axis millturn posts that clean the tool at the end of every toolpath. It adds a few seconds of time, but it allows us to run lights out with minimal ATC problems from chip wrap.
Years ago I worked at a shop that machined a lot of cast steel parts with stepped bore in the 3"-5" diameter range. On finish boring it was hard to get the chips to break and it would leave a nest in the bore for the next tool to catch. I ended up getting one of those metal dog leash corkscrews that you screw into the ground and mounting it in an ER holder. Feed into the hole clockwise to snag the chip ball, then retract, then reverse to fling the chip ball off. Wine corkscrews also work well for small holes.

-
2
-
-
The artec3d.com scanners that we did a demo of start at around $10k. That is much more affordable. We just found that the model quality and processing was not what we were looking for.
-
1
-
-
We use a Romer arm with a laser scanner and Verisurf software here to create surface models. We only need the surface models for clearance checks so we don't end up needing to create a water-tight model. We bring the surface data into Topsolid and work with it from there. We scan the front of engines and inside of engine bays for our design guys to use when creating new products. Not a cheap solution though. The Romer arm was a year old demo unit when we bought it plus the license of verisurf and PC needed to run it set us back $50k. Before we settled on the Romer arm we did some tests with one of these, https://www.artec3d.com/. It would easily cover your .025" tolerance needs and was a lot more reasonably priced. The biggest issue is the software to handle the point cloud data. Good software makes it a lot easier to blends different point clouds and create a continuous surface. Good software is not cheap though.
Edit; The main reason we went with the Romer arm was the ability to have the probe tip as well. We can take a laser scan and take probe measurements of planes, points, holes, etc in the same file. This makes it a lot easier to create our own models from physical samples when needed.
-
Check the physical operator key, lower right on the control on the control. This will lock axis movement with door open.
-
1
-
-
15 minutes ago, MIL-TFP-41 said:
Its funny how different AE's in different areas have loyalties different software packages....yet they all work for Mori.
Our local AE's have very high opinions on Gibbs.
It happens even in the same office. When I worked for the Okuma Distributor we had a time where we had AE's that worked with Esprit, Mcam, TopSolid, and Gibbs.
-
27 minutes ago, PAnderson said:
I have been reading that Schunk hydraulic holders are failing on very aggressive cuts. Tools are pulling out.
Paul
We had that issue with them. We also had the same issue with Iscar hydraulics in aggressive cuts. We also found them to have more chatter issues. I don't know if there is some sort of resonance issue from the hydraulic fluid in the holder or just from the thinner sections because of the fluid cavities. We switched to shrink fits for most of our tooling now and only use the hydraulics we have for finishing tools or drill/reamers.
-
I will also state my preference for the Helical 3 flute with chip breakers. We have good results with them, especially in chip control. Our mills are robot/FMS fed and the smaller chips are more easily washed away with coolant. As for the Kore5, for me it would really depend on a few factors; part geometry, Spindle HP, and machine ACC/DEC times. If the part geometry is to intricate and/or the machines ACC/DEC are not going to get up the desired feedrate I will opt for less flutes and more engagement, as long as the machine has the HP to handle it. I see a lot of those videos that Titan puts out and it just looks like the machine is going really fast but not a lot of material coming off. IMO the goal is MMR, not just going fast.
-
 1
1
-
1
-
Can adjusting the feed override during a g31 move cause unpredictable motion?
in Machining, Tools, Cutting & Probing
Posted
There was one instance I saw on a really old Okuma lathe that had an electrical short in the feedrate knob. It would cause the machine to take off in random movements when the feedrate knob was in the exact right position of the short. They replaced the panel and it fixed the issue.