YoDoug®
-
Posts
1,309 -
Joined
-
Last visited
-
Days Won
45
Content Type
Profiles
Forums
Downloads
Store
eMastercam Wiki
Blogs
Gallery
Events
Everything posted by YoDoug®
-
I use TopSolid to program our LT3000, but I do know from my last job that Mastercam does have a decent MT post and simulation for the LT2000.
-
I program and run an LT3000 every day. We just ordered an ABB IRB 4600 to automate it, should be here in 6 weeks. There are few things that I really like about the LT3000. 1. The thermal stability is awesome. I can start it up in the morning and the first part is in tolerance. Likewise, the machine sits very close to the overhead door that we bring material in and chip buckets out. In the winter that door opens and the shop temp drops by 10-20 degrees in a heartbeat. The machine stays stable. 2. The combination of the restart function and machine lock/CAS. I have my post almost perfect for our setup. I do not edit code at the machine. If I need to make a change I change it in TopSolid, repost and go. The machine lock and CAS functions allow me to run through the program quickly and safely to make sure we don't have any possible crashes. Then with the restart function I can restart easily at the right places for both turrets and finish the part. 3. The open API of the Okuma control. I have an app I made in C# that communicates with a Koyo PLC. The app watches certain signals in the machine like door open, in cycle, etc. Then it sets coils in the PLC to control chip conveyor, air knife on window, etc. The conveyor control is a big deal because the conveyor has an air knife to clear aluminum fines from the conveyor. The PLC minimizes the conveyor run time to only when needed so we are not wasting a lot of compressed air. I am working on adding a EIP output to the app for the robot cell. Our cell is designed to run multiple part numbers unattended. The machine tool is the master and will use the API app to pass variable info to the robot for part length, pick point, etc. This way we just use the machine schedule program functionality for production. 4. Lastly, but maybe most importantly is the ability for the NC to watch IO signal and make decisions. I have my post output a check at the beginning of each tool to check to see if the spindle that tool is working on is clamped. If it is not clamped it skips to the end of that tool. This allows me to run the same program for spindle 1 alone, spindle 2 alone, or both at the same time. It makes setup and prove out of new program very quick.
-
Have you seen the recent video that Okuma put together for cycletime reduction techniques in horizontals? Ask your distributor for a copy of it. It gives a few parameters and techniques that are not readily known. One is how to index the B axis while the machine is tool changing.
-
That sounds about right from my experience. That is only 14-15 revolutions of the spindle to reach 3000 rpm. That is quite a bit of acceleration. The bigger the spindle and power, the bigger the mass . The result is slower ramp up time. Okuma's are actually one of the faster machines to go from 0 to full RPM. As far as Tmac, tap monitoring is different than regular monitoring. It requires you to set up a "time slice" of the tapping power to isolate between cutting and ramp up. If the spindle is ramping the whole way you may not be able to use TMAC.
-
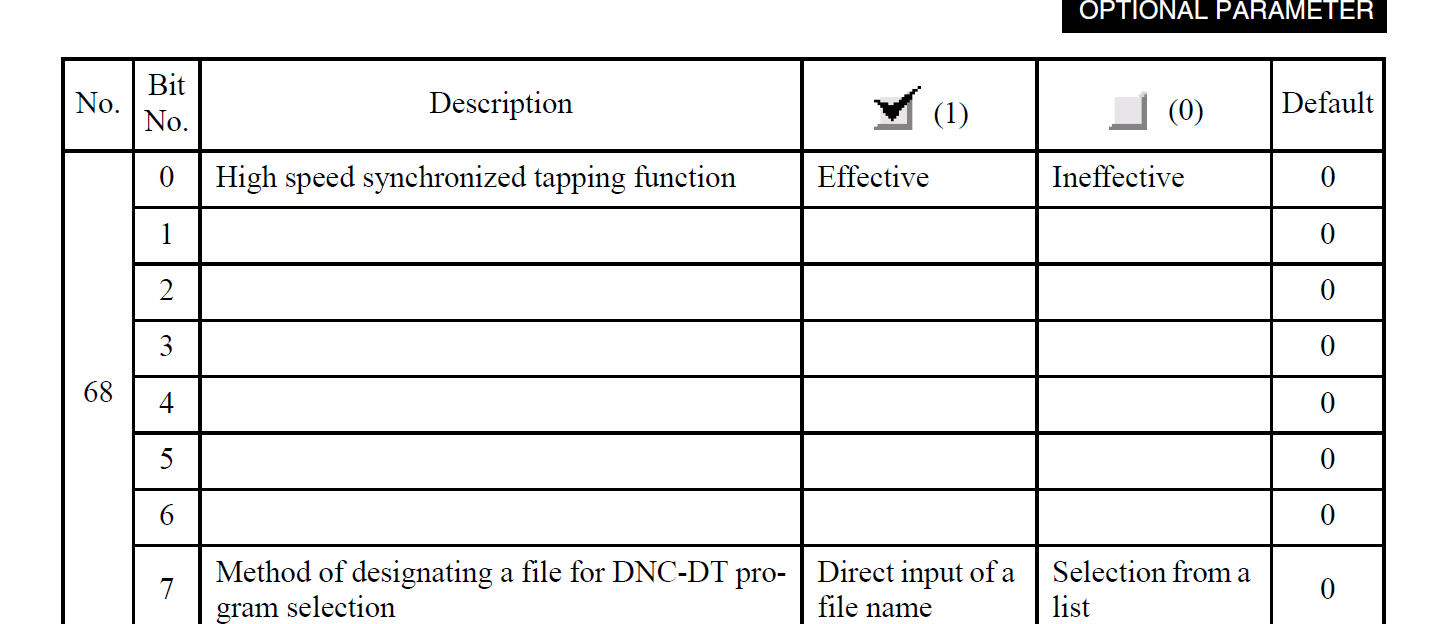
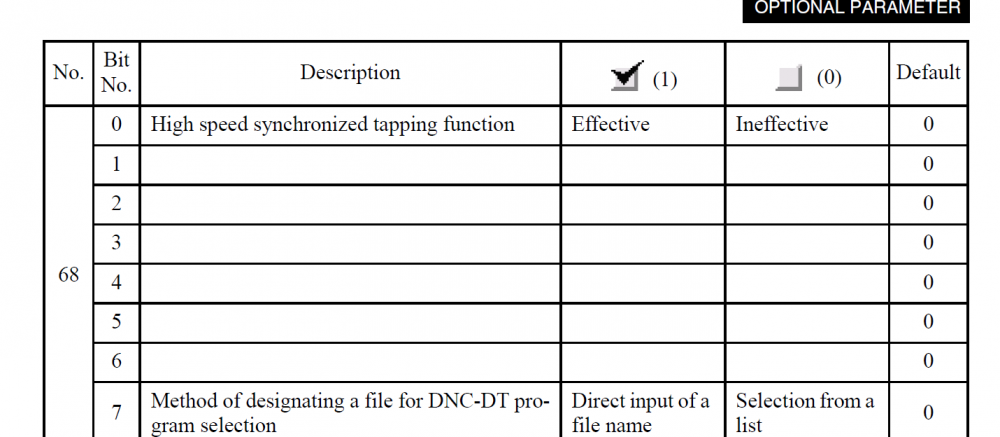
Make sure you have optional parameter 68 bit 0 checked. It is for high-speed sync tapping.
-
I think it is mostly used by 6 year olds.
-
Okuma Collision Avoidance System: Friendly STL files?
YoDoug® replied to danielm's topic in Industrial Forum
I run into this on a daily basis. I export from Topsolid and get the invalid stl error about 50% of the time. We also have Creo here and find about the same issue. One thing that does help is having the STL-eCheck lite program from Okuma on your PC. You can check the files before you go to the machine. I think it is still a free program. There is also a version that comes with the 3DVM software that will heal bad solids. That works every time, but it is not free. -
Here is another Okuma macro I just finished. It is for twin turret/twin spindle machines but could be modified for any lathe. It will save work offsets for A/B turrets, both spindles, and all 64 load monitor values for both turrets in a format that can be read back into NC to preload saved values into machine. It will create a file in MD1 called SETUP-SAVE.TXT. Just need to uncomment the turret calls, (G13) and (G14) to read as G13 and G14 in the TXT file before you copy it into your main program. Note; it takes about 3 minutes to write the TXT file since it is looping 128 times for load monitor values. For those that are cycle time concerned, it takes about 12 seconds to read in the data. G13 G140 P1 (OUTPUT OFFSETS) CLOSE C FWRITC MD1:SETUP-SAVE.TXT;C PUT' ' WRITE C G140 PUT '(G13)' WRITE C PUT 'G140' WRITE C PUT 'P1' WRITE C PUT 'VSZOZ=' PUT VSZOZ,9 WRITE C PUT 'VSZOC=' PUT VSZOC,9 WRITE C PUT 'VSZOW=' PUT VSZOW,9 WRITE C G141 PUT 'G141' WRITE C PUT 'VSZOZ=' PUT VSZOZ,9 WRITE C PUT 'VSZOC=' PUT VSZOC,9 WRITE C G140 CONT=0 NSTRA CONT=CONT+1 PUT 'VLMB1[' PUT CONT,2 PUT ']=' PUT VLMB1[CONT],3 WRITE C PUT 'VLMB2[' PUT CONT,2 PUT ']=' PUT VLMB2[CONT],3 WRITE C PUT 'VLMBB[' PUT CONT,2 PUT ']=' PUT VLMBB[CONT],3 WRITE C PUT 'VLMC1[' PUT CONT,2 PUT ']=' PUT VLMC1[CONT],3 WRITE C PUT 'VLMC2[' PUT CONT,2 PUT ']=' PUT VLMC2[CONT],3 WRITE C PUT 'VLMCB[' PUT CONT,2 PUT ']=' PUT VLMCB[CONT],3 WRITE C PUT 'VLMM1[' PUT CONT,2 PUT ']=' PUT VLMM1[CONT],3 WRITE C PUT 'VLMM2[' PUT CONT,2 PUT ']=' PUT VLMM2[CONT],3 WRITE C PUT 'VLMMB[' PUT CONT,2 PUT ']=' PUT VLMMB[CONT],3 WRITE C PUT 'VLMS1[' PUT CONT,2 PUT ']=' PUT VLMS1[CONT],3 WRITE C PUT 'VLMS2[' PUT CONT,2 PUT ']=' PUT VLMS2[CONT],3 WRITE C PUT 'VLMSB[' PUT CONT,2 PUT ']=' PUT VLMSB[CONT],3 WRITE C PUT 'VLMX1[' PUT CONT,2 PUT ']=' PUT VLMX1[CONT],3 WRITE C PUT 'VLMX2[' PUT CONT,2 PUT ']=' PUT VLMX2[CONT],3 WRITE C PUT 'VLMXB[' PUT CONT,2 PUT ']=' PUT VLMXB[CONT],3 WRITE C PUT 'VLMD1[' PUT CONT,2 PUT ']=' PUT VLMD1[CONT],3 WRITE C PUT 'VLMD2[' PUT CONT,2 PUT ']=' PUT VLMD2[CONT],3 WRITE C PUT 'VLMDB[' PUT CONT,2 PUT ']=' PUT VLMDB[CONT],3 WRITE C PUT 'VLMZ1[' PUT CONT,2 PUT ']=' PUT VLMZ1[CONT],3 WRITE C PUT 'VLMZ2[' PUT CONT,2 PUT ']=' PUT VLMZ2[CONT],3 WRITE C PUT 'VLMZB[' PUT CONT,2 PUT ']=' PUT VLMZB[CONT],3 WRITE C G4 F.01 IF [CONT GT 63] GOTO NENA GOTO NSTRA NENA PUT 'P2' WRITE C PUT 'M331' WRITE C PUT 'G140' WRITE C PUT 'P-99' WRITE C CLOSE C P2 M331 G14 G140 P2 CLOSE C FWRITC MD1:SETUP-SAVE.TXT;A PUT' ' WRITE C PUT '(G14)' WRITE C PUT 'G140' WRITE C PUT 'P1' WRITE C PUT 'VSZOZ=' PUT VSZOZ,9 WRITE C PUT 'VSZOC=' PUT VSZOC,9 WRITE C PUT 'VSZOW=' PUT VSZOW,9 WRITE C G141 PUT 'G141' WRITE C PUT 'VSZOZ=' PUT VSZOZ,9 WRITE C PUT 'VSZOC=' PUT VSZOC,9 WRITE C G140 CONT=0 NSTRB CONT=CONT+1 PUT 'VLMB1[' PUT CONT,2 PUT ']=' PUT VLMB1[CONT],3 WRITE C PUT 'VLMB2[' PUT CONT,2 PUT ']=' PUT VLMB2[CONT],3 WRITE C PUT 'VLMBB[' PUT CONT,2 PUT ']=' PUT VLMBB[CONT],3 WRITE C PUT 'VLMC1[' PUT CONT,2 PUT ']=' PUT VLMC1[CONT],3 WRITE C PUT 'VLMC2[' PUT CONT,2 PUT ']=' PUT VLMC2[CONT],3 WRITE C PUT 'VLMCB[' PUT CONT,2 PUT ']=' PUT VLMCB[CONT],3 WRITE C PUT 'VLMM1[' PUT CONT,2 PUT ']=' PUT VLMM1[CONT],3 WRITE C PUT 'VLMM2[' PUT CONT,2 PUT ']=' PUT VLMM2[CONT],3 WRITE C PUT 'VLMMB[' PUT CONT,2 PUT ']=' PUT VLMMB[CONT],3 WRITE C PUT 'VLMS1[' PUT CONT,2 PUT ']=' PUT VLMS1[CONT],3 WRITE C PUT 'VLMS2[' PUT CONT,2 PUT ']=' PUT VLMS2[CONT],3 WRITE C PUT 'VLMSB[' PUT CONT,2 PUT ']=' PUT VLMSB[CONT],3 WRITE C PUT 'VLMX1[' PUT CONT,2 PUT ']=' PUT VLMX1[CONT],3 WRITE C PUT 'VLMX2[' PUT CONT,2 PUT ']=' PUT VLMX2[CONT],3 WRITE C PUT 'VLMXB[' PUT CONT,2 PUT ']=' PUT VLMXB[CONT],3 WRITE C PUT 'VLMD1[' PUT CONT,2 PUT ']=' PUT VLMD1[CONT],3 WRITE C PUT 'VLMD2[' PUT CONT,2 PUT ']=' PUT VLMD2[CONT],3 WRITE C PUT 'VLMDB[' PUT CONT,2 PUT ']=' PUT VLMDB[CONT],3 WRITE C PUT 'VLMZ1[' PUT CONT,2 PUT ']=' PUT VLMZ1[CONT],3 WRITE C PUT 'VLMZ2[' PUT CONT,2 PUT ']=' PUT VLMZ2[CONT],3 WRITE C PUT 'VLMZB[' PUT CONT,2 PUT ']=' PUT VLMZB[CONT],3 WRITE C G4 F.01 IF [CONT GT 63] GOTO NENB GOTO NSTRB NENB PUT 'P2' WRITE C PUT 'M331' WRITE C PUT 'P-99' WRITE C CLOSE C M30
- 1 reply
-
- 4
-

-
Of the 150-ish part numbers our 3 month part usages range from 10 to 200 pieces. Everyday we need to flexibly change schedule to run small batches of parts. We looked at smaller pallet systems in verticals and/or robots, but after all the number crunching the Horizontal works out to be the best.
-
Definitely looking at the tall column as well as heavy load capacity. We are looking at having 8 sided tombstones with 2-10 parts per face depending on part size.
-
Hello Mastercam peeps. At my new job we are spec'ing out a new 500mm horizontal. Since I am no longer bound to Okuma by employment I am looking at Mori and Makino in addition to Okuma. We have roughly 150 different part numbers that need to be set up for small batch production so we are looking at 10-20 pallet systems. The parts are all very similar and share common tooling so 60 ATC will handle all of our needs. All aluminum parts but no really small tools so 15k rpm should be adequate. I am looking for any opinions and experience with the following machines. Makino A61NX W/pallet system Mori NHX5000 2nd gen W/pallet system
-
Okuma Subroutine Call OSP-300
YoDoug® replied to gcode's topic in Machining, Tools, Cutting & Probing
When you are in a schedule program there is a soft key that allows you to toggle between display of running program, schedule program, or sub program. You don't have to run blind. -
How Much Does Your Shop Spend On Coolant?
YoDoug® replied to McLaren's topic in Machining, Tools, Cutting & Probing
I have seen an air knife tried for aluminum that was a catastrophic failure. In order to get the chips not to pile in the corners the air pressure had to turned up to the point that the light aluminum chips were flying around the machine like a debris in a hurricane. Then when the air was turned off they all fell back to the corners. Maybe more strategic placement of air would help solve that problem but, compressed air is not cheap. The cost of all that air would be crazy expensive just to be able to machine dry. -
How Much Does Your Shop Spend On Coolant?
YoDoug® replied to McLaren's topic in Machining, Tools, Cutting & Probing
We are probably going to go with Kuka for robots. They seem to be the easiest to integrate a six axis force sensor for polishing. -
How Much Does Your Shop Spend On Coolant?
YoDoug® replied to McLaren's topic in Machining, Tools, Cutting & Probing
I would love the idea of dry cutting but the question I have is chip management. I'm working on a project right now in a twin turret, twin spindle lathe making aluminum parts that require super fine finishes. the parts are to be loaded and run unattended by robot. Without 1000psi coolant I couldn't imagine how this could be accomplished. The chips build up so fast. We are also setting up mill parts that require the same finishes and have a lot of material removal. If we didn't have all the coolant wash down we would have to have and operator there constantly blowing chips from the sides of the machines into the augers. -
Rockin' the vintage post! Ready Player One!
-
There are four different versions of NAVI. 1. NAVI Mg - this is a guided version for the mill. It uses a microphone and other input from user to minimize chatter. It is more of a manual operation. 2. NAVI Mi - This is an automatic version for milling spindles that uses a vibration sensor to analyze chatter and adjust speeds automatically. 3. NAVI Lg - This is a guided version for lathe turning operations. This is used in conjunction with the spindle speed variation function to minimize chatter. 4. NAVI Tg - This is a guided version for lathe threading operations. The NAVI-Mi is really impressive. We have a customer with a Multus U3000 that has the NAVI-Mi. They were using a 1/4 inch end mill sticking out about 1.75 inch to mill down inside a pocket on a part. The programmer set the initial speed at 6000 RPM. The endmill was chattering and the finish was poor. The operator reduced the speed to 3500 RPM to get a good finish but the cycle was slower. we helped them set up the NAVI Mi and it bumped the speed to 6014 RPM's and the finish was great with much shorter time in cut. The software shows you real time signals from the vibration sensor in both time domain and frequency domain. You can zero in on the unwanted frequency components and minimize them to improve cutting performance.
-
My experience is that you just add a P1 to your G43.4 TCP call line to turn on tool posture control. There are some parameters that dictate how much angle deviation it will allow before it corrects the posture.
-
This website will let you type or copy/paste text and convert it into a QR code. Then you can download a JPG of your QR to put on your setup sheet. Then any simple QR reader phone app can read it. I used it recently to create QR codes for setup info on a fixture. Then we laser marked the QR code onto the fixture. http://www.barcode-generator.org/
-
The three steps of journey level machining
YoDoug® replied to nickbe10's topic in Machining, Tools, Cutting & Probing
Please don't take my comments as criticism but we are a machine tool distributor that gets our licenses and support directly from CNC software. We have requested updated posts and tried to help get changes implemented. We have not had very good response to our requests. -
The three steps of journey level machining
YoDoug® replied to nickbe10's topic in Machining, Tools, Cutting & Probing
The Multus post is still being tweaked. It is close though. Honestly though, I have Mastercam MT, Esprit, and TopSolid on my PC. None of them can post 100% for the Multus U series. I have cases for all that still require hand editing, even with the "certified posts". -
The issue you are going to have with the standard Okuma measure cycles is that they only work in a single axis move. You will need to do your own G31 skip move and record the location of hit. You can do what you are looking for but it will take a bit of macro writing to get there. Your best bet is to use The Renishaw O9823, three point cycle to get the measurement you are looking for. If you don't have the Renishaw inspection plus macros I would recommend buying them. You will spend more time and cost trying to write your own macros than you can buy the Renishaw macros for.
-
RAD=SQRT[[XP1-XCEN]*[XP1-XCEN]+[YP1-YCEN]*[YP1-YCEN]]
-
Use Mastercam to figure out probe vectors for the three points on the radius. Make single point probe hits and record the three XY points to variables. Then the following code will find the center of a circle in Y and Z from three known points. Modify for X Y as needed. OCIRC(CIRCLE THROUGH 3 POINTS MACRO) YP1=VC31 (1ST Y) ZP1=VC32 (1ST Z) YP2=VC33 (2ND Y) ZP2=VC34 (2ND Z) YP3=VC35 (3RD Y) ZP3=VC36 (3RD Z) (GET PERPENDICULAR BISECTOR OF YP1, ZP1 and YP2, ZP2) PRP1 = [YP2 + YP1] / 2 PRP2 = [ZP2 + ZP1] / 2 PRP3 = YP2 - YP1 PRP4 = -[ZP2 - ZP1] (GET PERPENDICULAR BISECTOR OF YP2, ZP2 and YP3, ZP3) PRP5 = [YP3 + YP2] / 2 PRP6 = [ZP3 + ZP2]/ 2 PRP7 = YP3 - YP2 PRP8 = -[ZP3 - ZP2] (SEE WHERE THE LINE INTERSECT) (Y-CENTRE) YCEN = [PRP2 * PRP4 * PRP8 + PRP5 * PRP4 * PRP7 - PRP1 * PRP3 * PRP8 - PRP6 * PRP4 * PRP8] / [PRP4 * PRP7 - PRP3 * PRP8] (Z-CENTRE) ZCEN = [YCEN - PRP1] * PRP3 / PRP4 + PRP2 M02 After you know the center you can use Pythagorean theorem to find the radius from the delta between center and one of the original points. Or you could do it the easy way and use Renishaw inspection plus O9823 cycle.
-
The three steps of journey level machining
YoDoug® replied to nickbe10's topic in Machining, Tools, Cutting & Probing
I am in the loving TopSolid camp, but with that being said I will acknowledge that it is more laborious for simple stuff. If I only had to deal with single turret/single spindle lathes I would not like it. However, for complex twin/triple turret machines and five axis mills I love it. Although I can model all of BMT blocks for a simple Y axis lathe and accurately simulate multiple tools mounted in one turret station. As far as getting good code, I have never been afraid to edit when needed but I will admit the posts are like 90% there. I am hoping to take the post class with Jay sometime next year. For the things that do not post as it should, I make a lot of macros to handle repetitive things like spindle transfers, etc. As for Okuma machine def's, I make most of my own my self so they only update when I update them. I also use TopSolid for all of my modelling needs. I like having it all in one.